how to assemble robot

Let’s Start assembling the Robot
Step : 1 connect the motors to the clamps with the help of screws as in following pictures…......

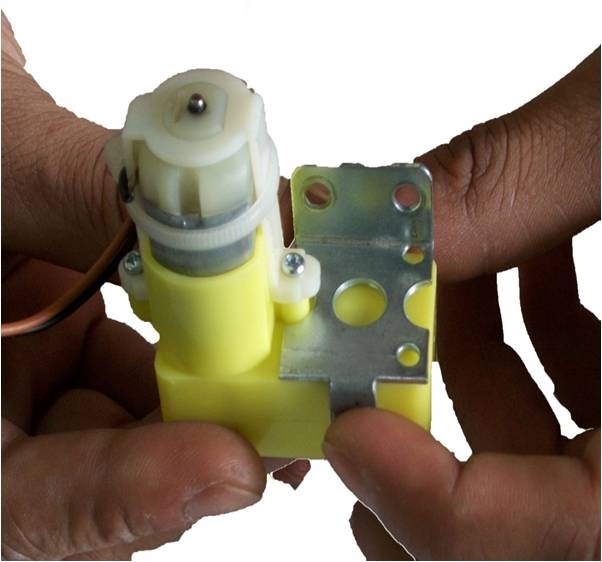
Step : 1 Contd…
Tight the screws as shown in picture with the help of screw driver

Step : 2 Fix the motors on the chassis cum motor driver board as shown by the red color arrows in following pictures….


Step : 2 contd…
fix the motors on the chassis board


Step : 2 contd…
Tight the screws as shown in picture with the help of screw driver

Step : 3
Fix both the wheels to the motors ….


Step : 3 contd….
Tight the screws as shown in picture….

After completing the step 3, our robot will look like this.

Step : 4
In this step, fix the support block/caster wheel on the chassis board….


Step 4 contd…


Step : 5
Now put the Robosapiens Rboard (ATMega8) on the chassis board with the help of nuts, bolts and spacers as shown in figures…


Step : 5 contd….
Put one big & two small spacers as shown


Step : 5 contd…

Step : 6 In this step, we’ll fix the IR Sensors in front of the robot as shown in following pictures….


Step : 6 contd…


Step : 6 contd…

Step : 7
Now connect the left IR sensor and right IR sensor to the PC0 and PC2 of PORTC as shown in figures….


Step : 7 contd…


Step : 7 contd…

Step : 8
Connect PB2,PB3 in M2-IN with the help of 2-PIN bi-directional wire.


Step : 9
connect PB4,PB5 in M1-IN eith the help of 2 PIN bi-directional wire.


Step : 9
connect the left motor in M1-OUT


Step : 10
connect the right motor in M2-OUT


Step : 11
In the last,connect the battery as shown in figures….


Step : 11 contd…


Step : 11 contd…


Step : 11 contd…


Front view

Top view

Step : 12
Put the lcd on the board as shown in picture

Thank you…
so now you will easily assemble your robot ...